
はじめに
マルチコプタの飛行制御をするため STマイクロエレクトロニクスのMEMSセンサであるLSM9DS1をRaspberry Pi Pico(以下Pico)で使用する方法について解説しています。
LSM9DSは加速度、角速度、地磁気を各3軸づつ合計9つの情報が得られます。そのため9自由度(9 degree of freedom)センサと呼ばれています。
- はじめに
- LSM9DS1ボード
- STマイクロのC言語用ドライバ
- PicoのSPI使用のサンプル
- LSM9DS1の構成について
- Picoと接続(SPIインターフェース)
- ハンドラ構造体
- Picoの初期化関連
- IMUの書き込み用関数
- MAGの書き込み用関数
- IMUの読み込み用関数
- MAGの読み込み用関数
- CMakelist.txtの内容
- センサ読み込みプログラム全体
- おわりに
LSM9DS1ボード
今回対象にしたのはマルチコプタ用のセンサとして採用予定以下のものです。
スイッチサイエンスで購入可能ですが、本記事を書いた時点では売り切れでした。
STマイクロのC言語用ドライバ
STマイクロが製作したドライバはGithubにあります。
このドライバを使用するには、SPIのアクセス用の関数の中身を使用するマイコン等に合わせて書いてやる必要があります。
こちらのGithubにはSTマイクロ製の各種センサのドライバがあります。
ここから、以下のファイルを自分のプロジェクトのディレクトリにコピーします。
- lsm9ds1_reg.c
- lsm9ds1_reg.h
そしてLSM9DS1を選ぶとサンプルプログラムもあります。 今回は、そのサンプルプログラムをPico様に書き換えた顛末を紹介したいと思います。
PicoのSPI使用のサンプル
PicoのSPIインターフェースを使用するサンプルもGithubにあります。
こちらを参考にしてPicoのSPI用のAPIの使用方法等を学んでいきました。
LSM9DS1の構成について
LSM9DS1というセンサは実は二つのセンサが一つのパッケージに入れられている構成になってます。
一つは加速度計とジャイロです。こちらはIMUと言う名前がつけられています。 もう一つが地磁気センサです。こちらはMAGと言う名前がつけられています。
これらはPicoからみると違うSPIインターフェースのセンサになっています。
接続Pinもチップセレクト(CS)が二つのSPIセンサとして別々になってます。 ソフトから見てもそれぞれに対して別々に対応します。
Picoと接続(SPIインターフェース)
Picoの電源は3.3Vです。このボードはも3.3V〜5Vで駆動できますので直接接続可能です。 レベル変換が必要なく、よかった。
Picoとの接続は以下の様にするものとします。
| Pico側 | LSM9DS1ボード側 | 備考 |
|---|---|---|
| GPIO 1 (pin 2) SPI0 CSn | CSAG | 加速度・ジャイロ選択 |
| GPIO 4 (pin 6) MISO/SPI0 RX | SDO(2ピンとも) | センサからデータ出力 |
| GPIO 5 (pin 7) SPI00 CSn | CSM | 地磁気計選択 |
| GPIO 6 (pin 9) SCK/SPI0 SCK | SCL | クロック |
| GPIO 7 (pin 10) MOSI/SPI0 TX | SDA | センサへデータ出力 |
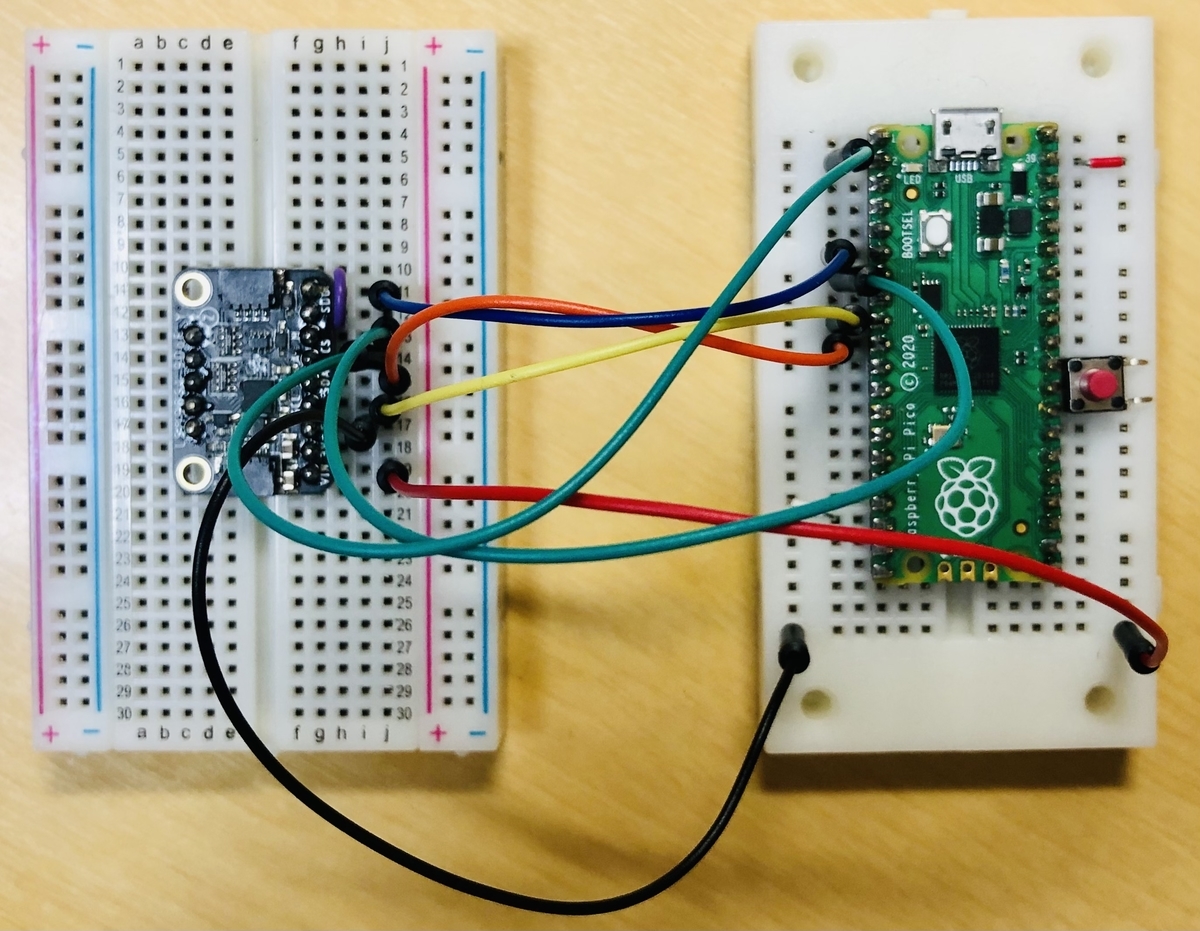
SPIインターフェースで使用する際にソフト的にもハード的にも特別なことをする必要はなく、 CSAGとCSMがローに落ちると自動的にSPIインターフェース通信と判断する模様。
ハンドラ構造体
どちらのセンサかを示すハンドラは構造体変数が定義されていて以下の様にしました
/* Define communication interface */ #define SENSOR_BUS spi0 /* Private macro -----------------------------------------------------*/ #define BOOT_TIME 20 //ms #define PIN_CSAG 1 #define PIN_MISO 4 #define PIN_CSM 5 #define PIN_SCK 6 #define PIN_MOSI 7 typedef struct { spi_inst_t *hbus; uint16_t cs_pin; } sensbus_t; /* Private variables -------------------------------------------------*/ static sensbus_t imu_bus = {SENSOR_BUS, PIN_CSAG }; static sensbus_t mag_bus = {SENSOR_BUS, PIN_CSM };
Picoの初期化関連
PicoでSPI使える様にしたり標準出力をUSB経由にしたりの設定
/* * @brief platform specific initialization (platform dependent) */ static void platform_init(void) { stdio_init_all(); printf("Hello, LSM9DS1! Reading raw data from registers via SPI...\n"); // This example will use SPI0 at 0.5MHz. spi_init(SPI_PORT, 500 * 1000); gpio_set_function(PIN_MISO, GPIO_FUNC_SPI); gpio_set_function(PIN_SCK, GPIO_FUNC_SPI); gpio_set_function(PIN_MOSI, GPIO_FUNC_SPI); // Chip select is active-low, so we'll initialise it to a driven-high state gpio_init(CSAG_Pin); gpio_init(CSM_Pin); gpio_set_dir(CSAG_Pin, GPIO_OUT); gpio_set_dir(CSM_Pin, GPIO_OUT); gpio_put(CSAG_Pin, 1); gpio_put(CSM_Pin, 1); sleep_ms(1000); }
IMUの書き込み用関数
/* * @brief Write generic imu register (platform dependent) * * @param handle customizable argument. In this examples is used in * order to select the correct sensor bus handler. * @param reg register to write * @param bufp pointer to data to write in register reg * @param len number of consecutive register to write * */ static int32_t platform_write_imu(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len) { sensbus_t *sensbus = (sensbus_t *)handle; cs_select(sensbus->cs_pin); spi_write_blocking(SPI_PORT, ®, 1); sleep_ms(10); spi_write_blocking(SPI_PORT, (uint8_t*) bufp, len); sleep_ms(10); cs_deselect(sensbus->cs_pin); return 0; }
MAGの書き込み用関数
/* * @brief Write generic magnetometer register (platform dependent) * * @param handle customizable argument. In this examples is used in * order to select the correct sensor bus handler. * @param reg register to write * @param bufp pointer to data to write in register reg * @param len number of consecutive register to write * */ static int32_t platform_write_mag(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len) { sensbus_t *sensbus = (sensbus_t *)handle; /* Write multiple command */ reg |= 0x40; cs_select(sensbus->cs_pin); spi_write_blocking(sensbus->hbus, ®, 1); sleep_ms(10); spi_write_blocking(sensbus->hbus, (uint8_t*) bufp, len); sleep_ms(10); cs_deselect(sensbus->cs_pin); return 0; }
IMUの読み込み用関数
/* * @brief Read generic imu register (platform dependent) * * @param handle customizable argument. In this examples is used in * order to select the correct sensor bus handler. * @param reg register to read * @param bufp pointer to buffer that store the data read * @param len number of consecutive register to read * */ static int32_t platform_read_imu(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len) { sensbus_t *sensbus = (sensbus_t *)handle; /* Read command */ reg |= 0x80; cs_select(sensbus->cs_pin); spi_write_blocking(sensbus->hbus, ®, 1); spi_read_blocking(sensbus->hbus, bufp, len); cs_deselect(sensbus->cs_pin); return 0; }
MAGの読み込み用関数
/* * @brief Read generic magnetometer register (platform dependent) * * @param handle customizable argument. In this examples is used in * order to select the correct sensor bus handler. * @param reg register to read * @param bufp pointer to buffer that store the data read * @param len number of consecutive register to read * */ static int32_t platform_read_mag(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len) { sensbus_t *sensbus = (sensbus_t *)handle; /* Read multiple command */ reg |= 0xC0; cs_select(sensbus->cs_pin); spi_write_blocking(sensbus->hbus, ®, 1); spi_read_blocking(sensbus->hbus, bufp, len); cs_deselect(sensbus->cs_pin); return 0; }
CMakelist.txtの内容
Picoのプログラムをコンパイルするためには
公式の作法に乗っ取るとcmakeでMakefile作ってmakeなので
CMakelist.txtが重要となるので以下に示します。
cmake_minimum_required(VERSION 3.13) include(pico_sdk_import.cmake) project(test_imu C CXX ASM) set(CMAKE_C_STNDARD 11) set(CMAKE_CXX_STANDARD 17) set(PICO_EXAMPLES_PATH ${PROJECT_SOURCE_DIR}) pico_sdk_init() add_executable(imu_test imu_test.c lsm9ds1_reg.c ) target_link_libraries(imu_test hardware_spi pico_stdlib) pico_enable_stdio_usb(imu_test 1) pico_enable_stdio_uart(imu_test 0) pico_add_extra_outputs(imu_test)
センサ読み込みプログラム全体
以下が今回の読み出しプログラムの全体です。
/* Includes ------------------------------------------------------------------*/ #include <string.h> #include <stdio.h> #include "pico/stdlib.h" #include "pico/binary_info.h" #include "hardware/spi.h" #include "lsm9ds1_reg.h" /* Define communication interface */ #define SENSOR_BUS spi0 /* Private macro -------------------------------------------------------------*/ #define BOOT_TIME 20 //ms #define PIN_CSAG 1 #define PIN_MISO 4 #define PIN_CSM 5 #define PIN_SCK 6 #define PIN_MOSI 7 typedef struct { spi_inst_t *hbus; uint16_t cs_pin; } sensbus_t; /* Private variables ---------------------------------------------------------*/ static sensbus_t imu_bus = {SENSOR_BUS, PIN_CSAG }; static sensbus_t mag_bus = {SENSOR_BUS, PIN_CSM }; static int16_t data_raw_acceleration[3]; static int16_t data_raw_angular_rate[3]; static int16_t data_raw_magnetic_field[3]; static float acceleration_mg[3]; static float angular_rate_mdps[3]; static float magnetic_field_mgauss[3]; static lsm9ds1_id_t whoamI; static lsm9ds1_status_t reg; static uint8_t rst; static uint8_t tx_buffer[1000]; /* Private functions ---------------------------------------------------------*/ /* * WARNING: * Functions declare in this section are defined at the end of this file * and are strictly related to the hardware platform used. * */ static int32_t platform_write_imu(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len); static int32_t platform_read_imu(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len); static int32_t platform_write_mag(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len); static int32_t platform_read_mag(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len); static void tx_com( uint8_t *tx_buffer, uint16_t len ); static void platform_delay(uint32_t ms); static void platform_init(void); /*付け加えた*/ static inline void cs_select(uint16_t cs_pin); static inline void cs_deselect(uint16_t cs_pin); /* Main Example --------------------------------------------------------------*/ void lsm9ds1_read_data_polling(void) { stmdev_ctx_t dev_ctx_imu; stmdev_ctx_t dev_ctx_mag; /* Initialize inertial sensors (IMU) driver interface */ dev_ctx_imu.write_reg = platform_write_imu; dev_ctx_imu.read_reg = platform_read_imu; dev_ctx_imu.handle = (void *)&imu_bus; /* Initialize magnetic sensors driver interface */ dev_ctx_mag.write_reg = platform_write_mag; dev_ctx_mag.read_reg = platform_read_mag; dev_ctx_mag.handle = (void *)&mag_bus; /* Initialize platform specific hardware */ platform_init(); /* Wait sensor boot time */ platform_delay(BOOT_TIME); /* Check device ID */ lsm9ds1_dev_id_get(&dev_ctx_mag, &dev_ctx_imu, &whoamI); if (whoamI.imu != LSM9DS1_IMU_ID || whoamI.mag != LSM9DS1_MAG_ID) { while (1) { /* manage here device not found */ printf("Device not found !\n"); sleep_ms(1000); } } /* Restore default configuration */ lsm9ds1_dev_reset_set(&dev_ctx_mag, &dev_ctx_imu, PROPERTY_ENABLE); do { lsm9ds1_dev_reset_get(&dev_ctx_mag, &dev_ctx_imu, &rst); } while (rst); /* Enable Block Data Update */ lsm9ds1_block_data_update_set(&dev_ctx_mag, &dev_ctx_imu, PROPERTY_ENABLE); /* Set full scale */ lsm9ds1_xl_full_scale_set(&dev_ctx_imu, LSM9DS1_4g); lsm9ds1_gy_full_scale_set(&dev_ctx_imu, LSM9DS1_2000dps); lsm9ds1_mag_full_scale_set(&dev_ctx_mag, LSM9DS1_16Ga); /* Configure filtering chain - See datasheet for filtering chain details */ /* Accelerometer filtering chain */ lsm9ds1_xl_filter_aalias_bandwidth_set(&dev_ctx_imu, LSM9DS1_AUTO); lsm9ds1_xl_filter_lp_bandwidth_set(&dev_ctx_imu, LSM9DS1_LP_ODR_DIV_50); lsm9ds1_xl_filter_out_path_set(&dev_ctx_imu, LSM9DS1_LP_OUT); /* Gyroscope filtering chain */ lsm9ds1_gy_filter_lp_bandwidth_set(&dev_ctx_imu, LSM9DS1_LP_ULTRA_LIGHT); lsm9ds1_gy_filter_hp_bandwidth_set(&dev_ctx_imu, LSM9DS1_HP_MEDIUM); lsm9ds1_gy_filter_out_path_set(&dev_ctx_imu, LSM9DS1_LPF1_HPF_LPF2_OUT); /* Set Output Data Rate / Power mode */ lsm9ds1_imu_data_rate_set(&dev_ctx_imu, LSM9DS1_IMU_59Hz5); lsm9ds1_mag_data_rate_set(&dev_ctx_mag, LSM9DS1_MAG_UHP_10Hz); /* Read samples in polling mode (no int) */ while (1) { /* Read device status register */ lsm9ds1_dev_status_get(&dev_ctx_mag, &dev_ctx_imu, ®); if ( reg.status_imu.xlda && reg.status_imu.gda ) { /* Read imu data */ memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t)); memset(data_raw_angular_rate, 0x00, 3 * sizeof(int16_t)); lsm9ds1_acceleration_raw_get(&dev_ctx_imu, data_raw_acceleration); lsm9ds1_angular_rate_raw_get(&dev_ctx_imu, data_raw_angular_rate); acceleration_mg[0] = lsm9ds1_from_fs4g_to_mg( data_raw_acceleration[0]); acceleration_mg[1] = lsm9ds1_from_fs4g_to_mg( data_raw_acceleration[1]); acceleration_mg[2] = lsm9ds1_from_fs4g_to_mg( data_raw_acceleration[2]); angular_rate_mdps[0] = lsm9ds1_from_fs2000dps_to_mdps( data_raw_angular_rate[0]); angular_rate_mdps[1] = lsm9ds1_from_fs2000dps_to_mdps( data_raw_angular_rate[1]); angular_rate_mdps[2] = lsm9ds1_from_fs2000dps_to_mdps( data_raw_angular_rate[2]); sprintf((char *)tx_buffer, "IMU - [mg]:%4.2f\t%4.2f\t%4.2f\t[mdps]:%4.2f\t%4.2f\t%4.2f\r\n", acceleration_mg[0], acceleration_mg[1], acceleration_mg[2], angular_rate_mdps[0], angular_rate_mdps[1], angular_rate_mdps[2]); tx_com(tx_buffer, strlen((char const *)tx_buffer)); } if ( reg.status_mag.zyxda ) { /* Read magnetometer data */ memset(data_raw_magnetic_field, 0x00, 3 * sizeof(int16_t)); lsm9ds1_magnetic_raw_get(&dev_ctx_mag, data_raw_magnetic_field); magnetic_field_mgauss[0] = lsm9ds1_from_fs16gauss_to_mG( data_raw_magnetic_field[0]); magnetic_field_mgauss[1] = lsm9ds1_from_fs16gauss_to_mG( data_raw_magnetic_field[1]); magnetic_field_mgauss[2] = lsm9ds1_from_fs16gauss_to_mG( data_raw_magnetic_field[2]); sprintf((char *)tx_buffer, "MAG - [mG]:%4.2f\t%4.2f\t%4.2f\r\n", magnetic_field_mgauss[0], magnetic_field_mgauss[1], magnetic_field_mgauss[2]); tx_com(tx_buffer, strlen((char const *)tx_buffer)); } } } /*チップセレクトの関数を追加*/ static inline void cs_select(uint16_t cs_pin) { //printf("cspin=%d\n",cs_pin); asm volatile("nop \n nop \n nop"); gpio_put(cs_pin, 0); // Active low asm volatile("nop \n nop \n nop"); } static inline void cs_deselect(uint16_t cs_pin) { asm volatile("nop \n nop \n nop"); gpio_put(cs_pin, 1); asm volatile("nop \n nop \n nop"); } /* * @brief Write generic imu register (platform dependent) * * @param handle customizable argument. In this examples is used in * order to select the correct sensor bus handler. * @param reg register to write * @param bufp pointer to data to write in register reg * @param len number of consecutive register to write * */ static int32_t platform_write_imu(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len) { sensbus_t *sensbus = (sensbus_t *)handle; //HAL_GPIO_WritePin(sensbus->cs_port, sensbus->cs_pin, GPIO_PIN_RESET); //HAL_SPI_Transmit(sensbus->hbus, ®, 1, 1000); //HAL_SPI_Transmit(sensbus->hbus, (uint8_t*) bufp, len, 1000); //HAL_GPIO_WritePin(sensbus->cs_port, sensbus->cs_pin, GPIO_PIN_SET); cs_select(sensbus->cs_pin); spi_write_blocking(/*sensbus->hbus*/spi0, ®, 1); spi_write_blocking(/*sensbus->hbus*/spi0, (uint8_t*) bufp, len); cs_deselect(sensbus->cs_pin); return 0; } /* * @brief Write generic magnetometer register (platform dependent) * * @param handle customizable argument. In this examples is used in * order to select the correct sensor bus handler. * @param reg register to write * @param bufp pointer to data to write in register reg * @param len number of consecutive register to write * */ static int32_t platform_write_mag(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len) { sensbus_t *sensbus = (sensbus_t *)handle; /* Write multiple command */ reg |= 0x40; //HAL_GPIO_WritePin(sensbus->cs_port, sensbus->cs_pin, GPIO_PIN_RESET); //HAL_SPI_Transmit(sensbus->hbus, ®, 1, 1000); //HAL_SPI_Transmit(sensbus->hbus, (uint8_t*) bufp, len, 1000); //HAL_GPIO_WritePin(sensbus->cs_port, sensbus->cs_pin, GPIO_PIN_SET); //return 0; cs_select(sensbus->cs_pin); spi_write_blocking(/*sensbus->hbus*/spi0, ®, 1); spi_write_blocking(/*sensbus->hbus*/spi0, (uint8_t*) bufp, len); cs_deselect(sensbus->cs_pin); return 0; } /* * @brief Read generic imu register (platform dependent) * * @param handle customizable argument. In this examples is used in * order to select the correct sensor bus handler. * @param reg register to read * @param bufp pointer to buffer that store the data read * @param len number of consecutive register to read * */ static int32_t platform_read_imu(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len) { sensbus_t *sensbus = (sensbus_t *)handle; /* Read command */ //reg |= 0x80; //HAL_GPIO_WritePin(sensbus->cs_port, sensbus->cs_pin, GPIO_PIN_RESET); //HAL_SPI_Transmit(sensbus->hbus, ®, 1, 1000); //HAL_SPI_Receive(sensbus->hbus, bufp, len, 1000); //HAL_GPIO_WritePin(sensbus->cs_port, sensbus->cs_pin, GPIO_PIN_SET); //return 0; reg |= 0x80; cs_select(sensbus->cs_pin); spi_write_blocking(/*sensbus->hbus*/spi0, ®, 1); spi_read_blocking(/*sensbus->hbus*/spi0, 0, bufp, len); cs_deselect(sensbus->cs_pin); return 0; } /* * @brief Read generic magnetometer register (platform dependent) * * @param handle customizable argument. In this examples is used in * order to select the correct sensor bus handler. * @param reg register to read * @param bufp pointer to buffer that store the data read * @param len number of consecutive register to read * */ static int32_t platform_read_mag(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len) { sensbus_t *sensbus = (sensbus_t *)handle; /* Read multiple command */ //reg |= 0xC0; //HAL_GPIO_WritePin(sensbus->cs_port, sensbus->cs_pin, GPIO_PIN_RESET); //HAL_SPI_Transmit(sensbus->hbus, ®, 1, 1000); //HAL_SPI_Receive(sensbus->hbus, bufp, len, 1000); //HAL_GPIO_WritePin(sensbus->cs_port, sensbus->cs_pin, GPIO_PIN_SET); //return 0; reg |= 0xC0; cs_select(sensbus->cs_pin); spi_write_blocking(/*sensbus->hbus*/spi0, ®, 1); spi_read_blocking(/*sensbus->hbus*/spi0, 0, bufp, len); cs_deselect(sensbus->cs_pin); return 0; } /* * @brief Send buffer to console (platform dependent) * * @param tx_buffer buffer to transmit * @param len number of byte to send * */ static void tx_com(uint8_t *tx_buffer, uint16_t len) { //CDC_Transmit_FS(tx_buffer, len); printf("%s",tx_buffer); } /* * @brief platform specific delay (platform dependent) * * @param ms delay in ms * */ static void platform_delay(uint32_t ms) { sleep_ms(ms); } /* * @brief platform specific initialization (platform dependent) */ static void platform_init(void) { /* TIM3->CCR1 = PWM_3V3; TIM3->CCR2 = PWM_3V3; HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2); HAL_Delay(1000); */ stdio_init_all(); sleep_ms(1000); printf("Hello, LSM9DS1! Reading raw data from registers via SPI...\n"); // This example will use SPI0 at 0.5MHz. spi_init(SENSOR_BUS, 10 * 1000); gpio_set_function(PIN_MISO, GPIO_FUNC_SPI); gpio_set_function(PIN_SCK, GPIO_FUNC_SPI); gpio_set_function(PIN_MOSI, GPIO_FUNC_SPI); // Chip select is active-low, so we'll initialise it to a driven-high state gpio_init(PIN_CSAG); gpio_init(PIN_CSM); gpio_set_dir(PIN_CSAG, GPIO_OUT); gpio_set_dir(PIN_CSM, GPIO_OUT); gpio_put(PIN_CSAG, 1); gpio_put(PIN_CSM, 1); sleep_ms(1000); } int main(void) { lsm9ds1_read_data_polling(); return 0; }
おわりに
やろうと思い立ってから数ヶ月の時間がかかりようやく生の値を読み取れるところまで来ました。 ここからフィルタ作ったり、校正プログラム作ったり、色々ありますが、センサの値が読み取れないと 始まらないので大きな一歩です。
Raspberry Pi PicoでLSM9DS1とSPI接続はあまり資料がないので、一応、Githubにあげときますね。
また、次回!