
はじめに
こんにちは、こうへいです。
皆さんS.BUSはご存知でしょうか?
双葉さんのラジコンプロポの通信プロトコルです。
シリアル通信でサーボ等のコントロールをするための通信規格になります。
ドローンやロボコンやらで,
ロボットを遠隔操作しようとしたり,
自律化しようとすると
S.BUS信号のデコードやエンコードの必要が出てきて,
それなりに調べたり実装したりするのに時間がかかります。
そこで、今回は
S.BUSについて整理して残しておこうと思います。
本ブログの記事については全てそうですが
本記事の内容についても、個人的に調べたものですので、完全に正しいことが書かれてはいないかもしれません。 何らかの形で本記事を参考にしていただけるとありがたいですが、本記事の利用については自己責任でお願いいたします。
S.BUSプロトコルとは
ラジコンプロポメーカーの双葉さんが開発した、ラジコン用の通信プロトコルです。
シリアル通信の一種ですが、
PCやマイコンで扱おうとすると少し癖があるので注意です。
最近はマルチコプタのラジコンが大流行で、
たいていのフライトコントローラがS.BUSをサポートしています。
フライトコントローラにボードPCを繋いで自律型の飛行ロボットにする場合などに、
S.BUSのエンコードがしたくなったのでいろいろ調べました。
S.BUSでぐぐるとホイホイ堂blogさんにたどり着いて、ほとんどのことはわかります。
改めて、自分用メモも兼ねて以下にS.BUSプロトコルを書いておきます。
S.BUSプロトコル仕様
ホイホイ堂blogさんのところから引用されている
Futaba S-BUS controlled by mbed
から少し変更を加えて転載させてもらうと、 次のような感じになる。
通信仕様
- データ全体の長さ:25 Byte
- 送信周期:14ms(analog mode) or 7ms(highspeed mode)
- データの構成:1スタートビット、8データビット、1偶数(Even)パリティビット、2ストップビット[8E2]
- 速度:100,000 bps
- 特記事項:データは通常のシリアル信号に対して反転している。
データ全体の構成
[startbyte] [data1] [data2] .... [data22] [flags][endbyte]
- startbyte(data0) = 0x0F
- data 1-22 = [ch1, 11bit][ch2, 11bit] .... [ch16, 11bit]
- data 23
- bit0 = flags = ch17 = digital channel (0x01)
- bit1 = ch18 = digital channel (0x02)
- bit2 = Frame lost, equivalent red LED on receiver (0x04)
- bit3 = failsafe activated (0x08)
- bit4 = n/a
- bit5 = n/a
- bit6 = n/a
- bit7 = n/a
- endbyte(data24) = 0x00
通信速度が100,000bpsも変わっています。
それに加えて
特記事項にあるのが注意点ですが、
マイコンやPCのUARTで読み書きする場合は、
信号を反転する必要があります。
信号の反転にはNOT素子やトランジスタを使用します。
データフォーマットは以上ではわかりにくいので
全データのビット構成を視覚化した、
S.BUS信号マップを
Excelを使って表を作ってみました。
S.BUS信号マップ

反転回路
S.BUS信号は通常のシリアル通信からみると
信号のHighとLowがひっくり返っているので、
マイコン等で信号を読み取ったり、逆にS.BUSサーボを動かすために
信号を反転する必要があります。
そのためには標準ロジックのInvaterを使うか、
下図のようなトランジスタで反転回路を作ります。

上図の回路を、その辺に転がっていた以下の部品で作り実験しました。
- トランジスタ:2SC1815
- 抵抗R1:3.3kΩ
- 抵抗R2:100Ω
実際に通電して実験して得られた波形が以下です。

上のオシロスコープの波形は
黄色が反転する前のマイコンが作った入力信号,
水色がトランジスタインバータ回路で反転した結果です.
今のところ,ちゃんと分析してないのですが,少し無駄時間があるのと,
なまっていますが,これでもサーボは動きました.
水色は黄色が立ち下がった時に,何やらひげが出てるのですが,
その後遅れて立ち上がるところが気になるのですが,
今日は深入りしないことににします.
適当に作ったトランジスタ回路だとこんなものなのかなあ. (何か忘れている・・・)
以上の無駄時間となまりについては後日検討してブログにまとめました。
シリアル通信とS.BUS信号の読解
ドローンやロボット制御などでS.BUSを使用したい時に,
シリアル通信のビット列を見ることができれば楽なのですが,
普通はそういう環境が無い場合が多いと思います.
せめてオシロスコープを繋げて信号を見て確かめることができればと思いますよね。
(オシロスコープも中々無いかも知れませんが・・・)
その際に,信号を読めなければならないので,
シリアル通信について復習して,S.BUS信号を読んでみたいと思います
シリアル通信について調べてみると
大変良い記事に出会いましたので紹介します.
参考記事で明らかなように,
シリアル通信は数ビットのデータ1パックとして,順番に送り出していく方式です。
1パックの中身はおおむね「スタートビット,データビット,パリティビット,ストップビット」で構成されています。
それぞれのビットが0なのか1なのか,それらの長さは設定できます。
上記のS.BUSの通信仕様にもありますが,
省略して8E2のように書かれることが多いようです。
これは,「データは8ビット長で,パリティビットは偶数,ストップビット(値は1)は2ビット長ですよ」という意味です。
パリティビットが偶数の場合は,データビットの部分で1の数が偶数の場合は0になります。
さて,以下は
S.BUS受信機の出力をデジタルオシロで取り込みオシロの画面をキャプチャしたものです。

100,000bpsと言う通信速度はシリアル通信では珍しいのですが,オシロで見るときは1devを10μsにすると区切りが良くて,見やすいです.
1パック分の信号について分析してみます。
以下の説明は、信号を反転させたものについてです。
上の画像はS.BUS信号の最初の1バイト目をとらえたものです.
図を見ると,スタートビットは0です.続いてデータビットがあり,それらのビット列は00001111だとわかります. つづいてパリティビットは0でデータビットの1の数は偶数なのでつじつまが合っています. 最後に,ストップビットですが設定どおり2ビットの1が並んでいます.
S.BUS信号の最初の1バイト目は0x0Fが送られることになっていますので,この読解は仕様と一致しています.
間違いやすいので強調したいのですが,
シリアル通信のビット列は1バイトのデータの最下位の桁から送られてきます.
オシロ等でデータを検証するときに,今回示した図の通りに読むと最下位ビットと最上位ビットを反転させて 逆に読んでしまって手動デコードの結果がおかしなことになるので要注意です.
S.BUSとS.BUS2
Twitterでつぶやいたのですが、
S.BUSにはS.BUS2という規格があり,受信機から出ている信号を比較してみました.
どちらも15ms間隔でシリアル信号を出しています。
S.BUS2はそれに加えて60msにテレメトリ関連と思われる信号を出しているということがわかりました.
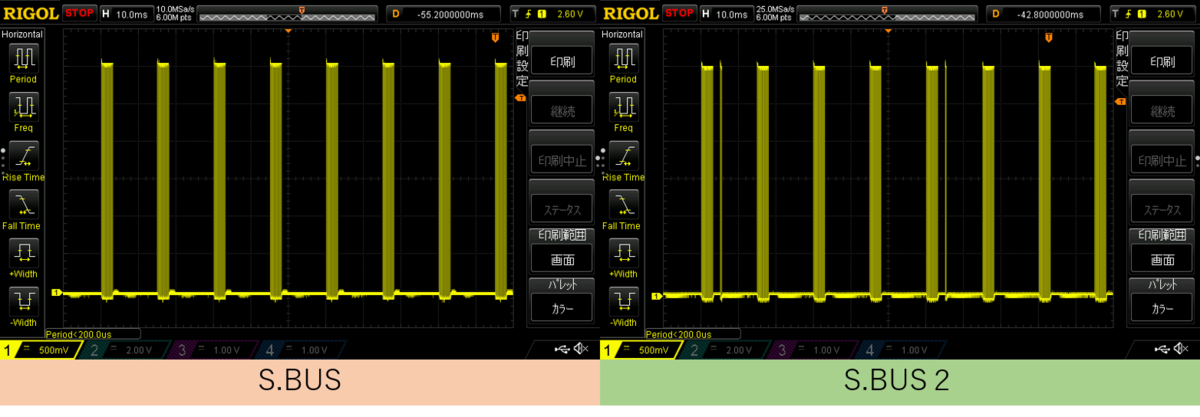
【メモ】ラジコン受信機から出ているS.BUSとS.BUS2信号の比較.どちらも15ms間隔でシリアル信号を出しています.S.BUS2はそれに加えて60msにテレメトリ関連と思われる信号を出しています. pic.twitter.com/3EkXv347qW
— Kouhei Ito (@kouhei_kanazawa) March 12, 2020
実装の参考
今回はArduinoUNOでS.BUSサーボを動かしたかったので,
適当なコードをGitHubで探したのが以下です.感謝です.
探すとたくさんありますのでお好きなものを活用されたらいいと思います.
やってみて注意ですが,ArduinoUNOで動かしている例はあまりありません.
ArduinoUNOで実験する際の注意点
大体Megaで実験している記事が多いですが、
これはMegaはシリアル通信が2つあって、
サーボを動かす実験では
一つ目のシリアルポートがS.BUSに
もう一つのシリアルポートがPC等との情報のやりとりに
使われています。
UNOはシリアル通信(UART)が1つしかないのでS.BUSに占有されて、
デバグ用のシリアル通信が基本できない(ソフトシリアルで可能)ので、コンパイルのときにエラーになります。
しかし、
UNOでもソースでポートをserial1等に指定されているところをserialに書き換えるだけで,動きます。
上記のソースもserialに書き換えると旨く動きました。
ただし、この場合はシリアル通信してPC等に何らかの情報を送れなくなりますので注意してください。
おわりに
今回は,ドローンやロボット制御で使いたくなるS.BUSについて取り扱ってみました.
自分でロボットを動かすときに毎回毎回調べなおすのも大変ですので,一度まとめておきたくて, すっきりしました.
実際S.BUS信号をRaspberry Pi等で作り出して、
市販のレース用フライトコントローラを用いてドローンを自立化する方策について
以下でまとめ初めましたので参考にしてください。
S.BUS2についてはまだ未確認です.情報もあまりないような気がします.いつかは触れてみたいと思います.
以下はS.BUSにも対応したオープンソースの送信機でJumperのT18です。 電波モジュールが取り外せるので、独自の送信機を作れます。おすすめです。

オシロスコープの奮発して揃えると、電子工作関係が一気にパワーUPします
 デジタルオシロスコープ 50MHz 4ch 1GSa/s 【国内正規品】,DS1054Z")
参考文献
www.hoihoido.com Futaba S-BUS controlled by mbed os.mbed.com https://lab.fujiele.co.jp/articles/8191/lab.fujiele.co.jp